走行マイクロメカニズム競技
■この競技の概要
図1に示す走行路を最短時間で走破する走行マイクロメカニズム競技を行います.
無線部門のみ実施しゴールに到達するまでの最短時間で優勝マシンを決定します.
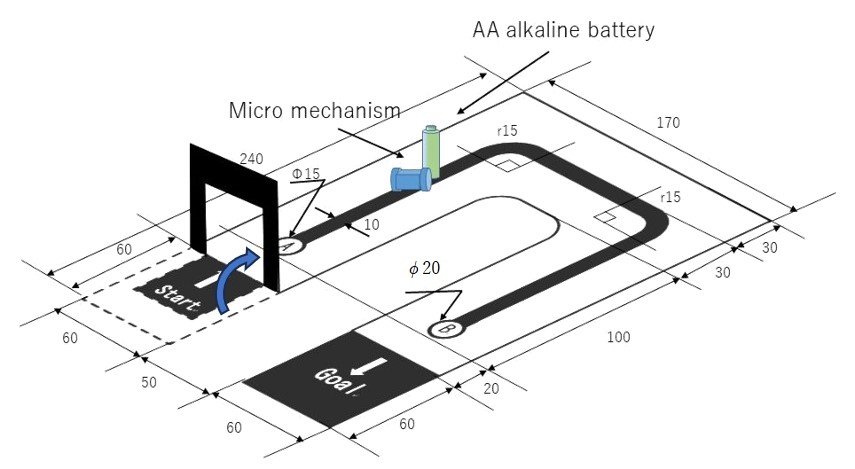
図1 走行マイクロメカニズム競技の流れ
(図をクリックすると拡大図が表示されます.)
競技フィールドのPDFデータは、ここをクリックして表示し保存してください。
以下の動画は, 大坂 友人様からご提供頂いたゲート無し競技の参考動画(2023年度版)になります.

図2. 昨年の大阪様による優勝マシン
■競技説明
競技はスタートエリアから出発し,ゲートを通ってA地点に置かれた単三(AA)アルカリ乾電池をB地点まで運び,ゴールエリア内で停止するまでの最短時間を競います.
マシンは競技フィールドに書かれた黒の軌道から外れても構いませんが, 電池は黒線から外れたり倒れたりした場合は再スタートとなります.
B地点に運ばれた電池はサークル内に収まっている必要があり,はみ出たり倒れた状態では不十分とみなします.
また,ゴールはマシンがゴールエリア内に収まり完全に停止した状態をゴールとみなします.
マシンの一部がはみ出ていたり,ゴールを通り過ぎてしまった場合はゴールとみなさず,ゴールエリア内に完全に収まって停止するまで計時を続けます.
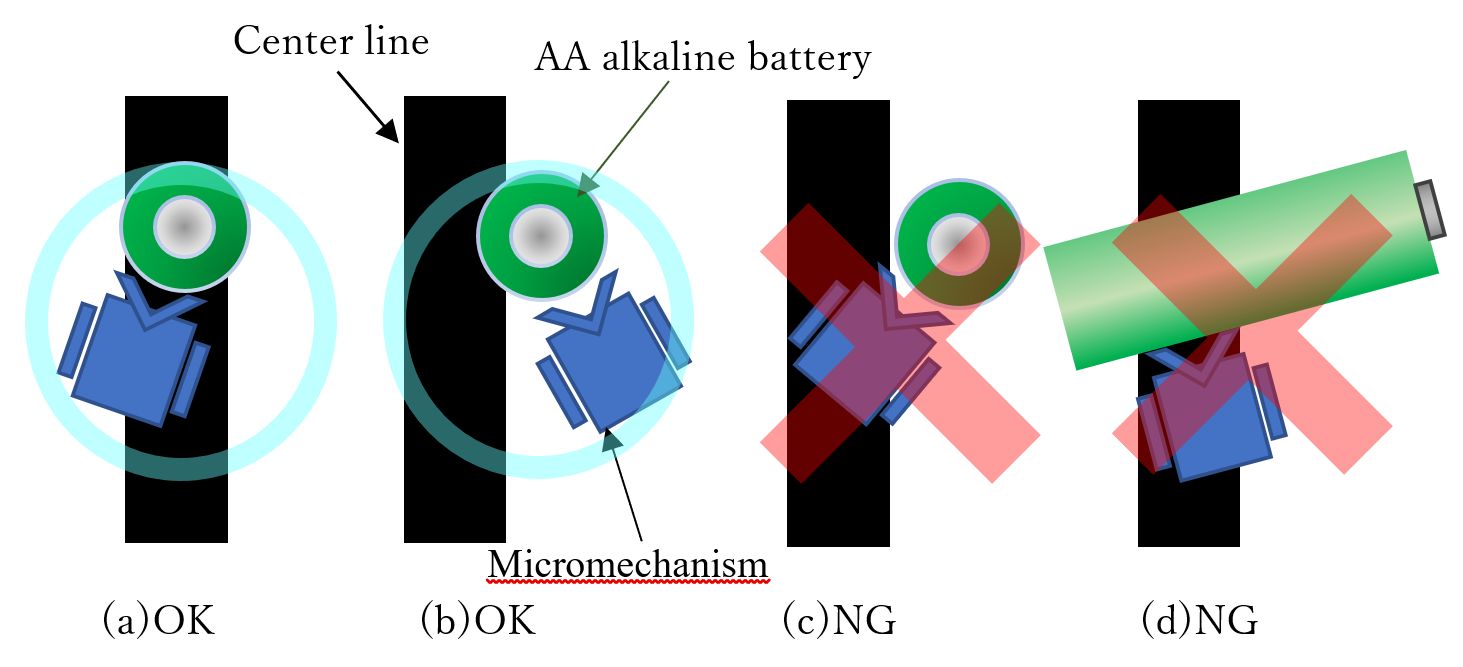
図3 コースアウトの例
(図をクリックすると拡大図が表示されます.)
●競技フィールド:
マイクロメカニズムイベントのWEBサイトから競技フィールドのファイルをダウンロードし,A4サイズ以上の用紙に印刷して下さい.
●競技フィールド用の用紙:
A4サイズ以上の平らな紙であれば特に種類を指定しません.
各マシンに合った用紙を使用してください.
●使用する電池:
単3(AA)のアルカリ乾電池を使用して下さい.
メーカー等は特に問いません.
●動画の撮影:
動作の様子を動画に撮影し,最短時間でゴールに到達した動画を申し込みフォームにアップロードしてください.
この時、いくつかの注意点があります.
大まかには、以下の二つの事についてです.
1) カメラアングルと画角
① なるべく競技フィールド中央の垂直位置にカメラを設置し、真上から撮影するようにしてください.
この際、競技フィールドが全て映る様に画角を調整してください.
極端な広角レンズなどを用いず周辺部にひずみが出ないよう注意してください.
② マシンの動作開始から、ゴールして停止するまでカメラは固定のままで動かさないようにしてください.
ただし動作開始前もしくはゴール後に、マシンの詳細を説明するため、カメラを手持ちにして撮影しても構いません.
2) 計時装置の同時写し込み
① 時計やスマートフォンの時計アプリなど、計時に使った装置を画面の一部に写り込むように撮影してください.
② 時計やスマートフォンの設置場所に関しては特に指定しませんが、スタートエリアやゴールエリア、
走行ライン上にはおかないようにしてください.
③ Youtube を見ている方にも時計表示が見えるような大きさを確保してください.
動画合成機能を用いて時計や時間表示を合成しても構いません.
■条件
(a) 無線部門のみとします.
(b) 今大会より無線部門を「無線による遠隔操縦を許した『遠隔操作クラス』」と「自立的な移動のみを許可する『自立走行クラス』(新設)」に分ける.
(c) 遠隔操作クラスのマシンレギュレ―ション
スタート時の手腕(ハンド・アーム)、無線信号受信のためのアンテナや受光部、電源供給のための端子等を含めた大きさは最大の状態で20mm*20mm*30mmの直方体内に収めていただきます.
スタート後はこの寸法以上あるいは分離も可とし,競技を行います. 走行形式は,走る,はう,はねる等自由とします.
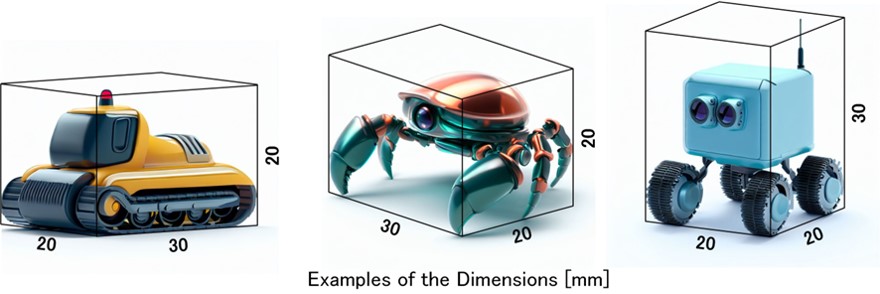
図4 遠隔操作クラスのマシンレギュレーション
(図をクリックすると拡大図が表示されます.)
(d) 自立走行クラスのマシンレギュレ―ション
スタート時の手腕(ハンド・アーム)を含めた大きさは最大の状態で30mm*30mm*30mmの直方体内に収めていただきます.
実機における外部PCからプログラム転送を行うためのインターフェースなど、頻繁に抜き差しを行うことが予想される端子部分に関しては寸法外とする.スタート後はこの寸法以上あるいは分離も可とし,競技を行います. 走行形式は,走る,はう,はねる等自由とします.
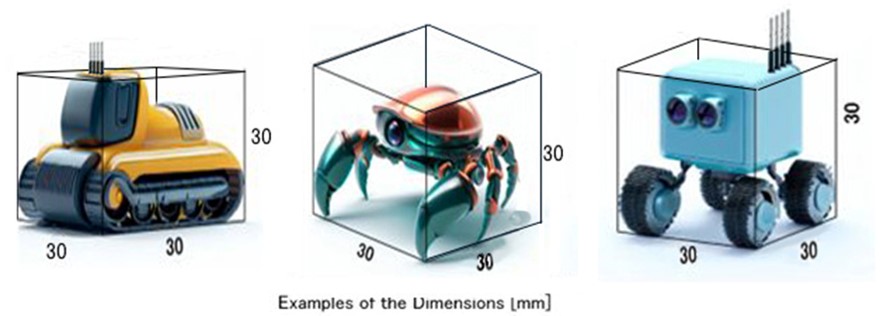
図5 自立走行クラスクラスのマシンレギュレーション
(図をクリックすると拡大図が表示されます.)
トップページに戻る
|